AWS DeepRacer simulation: Launch race track in Gazebo
Roadmap
- Setup
- Launch race track in Gazebo
- Car model
- Car control
- Teleoperation
Quick Overview of ROS1 concepts
- Packages: Are the software organization unit of ROS code. Each package can contain libraries, executables, scripts, or other artifacts.
- Nodes: A node is an executable that uses ROS to communicate with other nodes.
- Messages: ROS data type used when subscribing or publishing to a topic.
- Topics: Nodes can publish messages to a topic as well as subscribe to a topic to receive messages.
- Master: Name service for ROS (i.e. helps nodes find each other)
- catkin: A method for organizing and building your ROS code
- Workspace: A working directory where all packages are stored and build with catkin
Launch Gazebo using ROS
The very first step is to create a catkin workspace if it not already exists.
mkdir -p ~/deep_ws/src
cd ~/deep_ws/
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3Create a package with name simulation. Here we will gather all code for launching Gazebo and loading race track worlds.
cd ~/deep_ws/src
# create package with name 'simulation' and dependency on 'gazebo_ros'
catkin_create_pkg simulation gazebo_ros
cd ../
catkin_makeAfter every
catkin_makebe sure to source your workspace!!!
. ~/deep_ws/devel/setup.bashGazebo in ROS has 2 nodes: gzserver and gzclient. As you remember in ROS to launch a node(script) you should first launch ROS MASTER. In order to launch both Gazebo nodes you should:
- run roscore(ROS MASTER), gzserver and gzclient in three separate terminals
- or make a
launchfile I preferlaunchfiles. They make running ROS code so much easier. Go todeep_ws/src/simulationfolder and makelaunchdirectory, in which create a filegazebo.launch. This example code launches two Gazebo nodes with theworldargument, which now leads to empty world:
<!-- deep_ws/src/simulation/launch/gazebo.launch -->
<?xml version="1.0"?>
<launch>
<arg name="world_name" default="worlds/empty.world"/>
<node name="gazebo" pkg="gazebo_ros" type="gzserver" respawn="false" output="screen" args="$(arg world_name) "/>
<node name="gazebo_gui" pkg="gazebo_ros" type="gzclient" respawn="false" output="screen" />
</launch>
world- is how our simulation looks, all objects, lights, shadows, etc. Empty world has nothing - only ground plane, 3-d axes and a source of light.
Now we can launch empty world in Gazebo
cd ~/deep_ws
source devel/setup.bash
roslaunch simulation gazebo.launch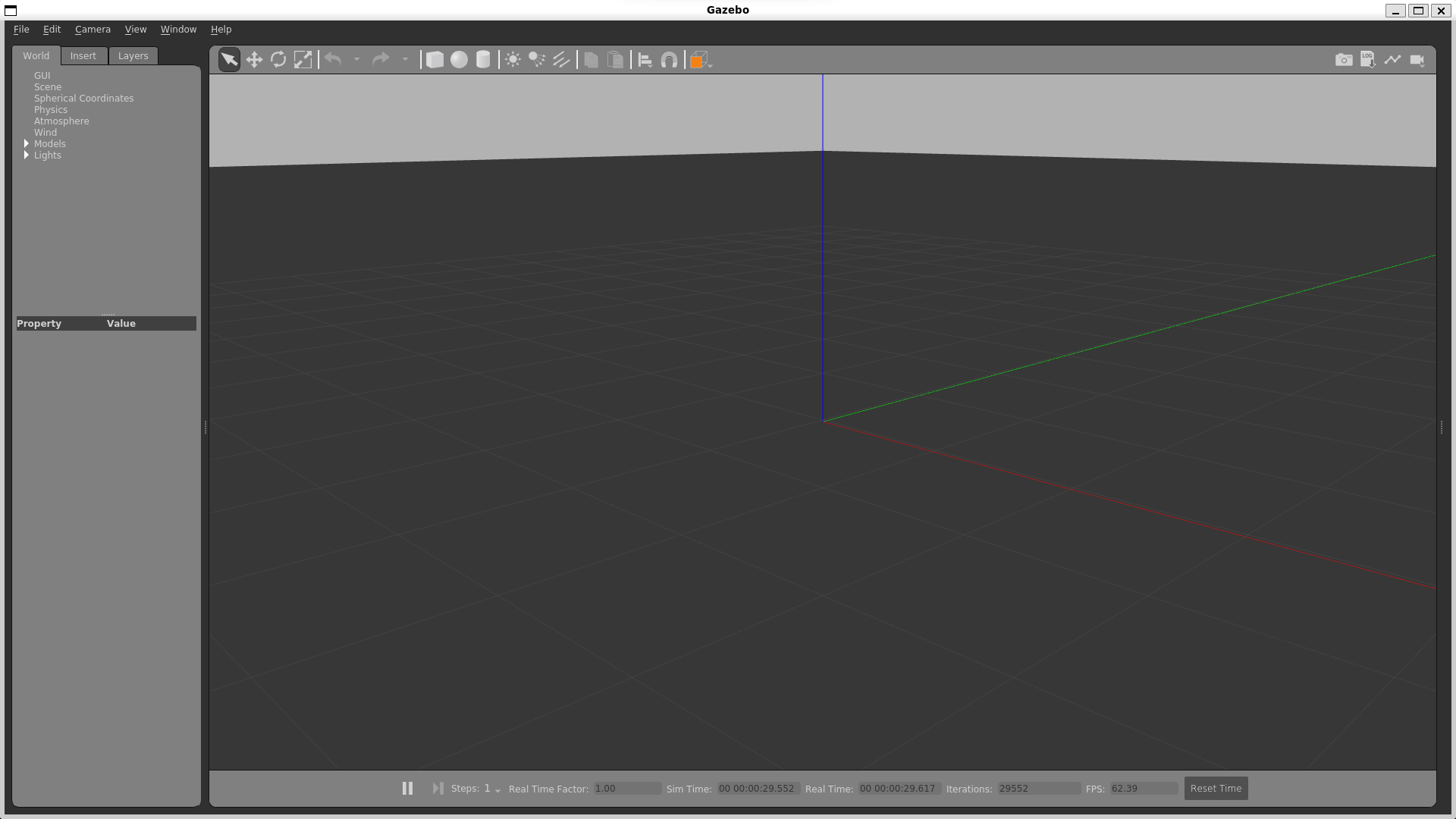
That was not so difficult. Now lets load a race track world.
Load a race track world
For this task you need folders meshes, models, worlds and routes from deepracer_simapp. Download them all to deep_ws/src/simulation and create a simulation.launch file in deep_ws/src/simulation/launch folder. This launch file will include previous gazebo.launch and will pass a world argument.
<!-- deep_ws/src/simulation/launch/simulation.launch -->
<?xml version="1.0"?>
<launch>
<arg name="world_name" default="$(find simulation)/worlds/2022_march_pro.world"/>
<include file="$(find simulation)/launch/gazebo.launch">
<arg name="world_name" value="$(arg world_name)"/>
</include>
</launch>Similarly run it from deep_ws folder with
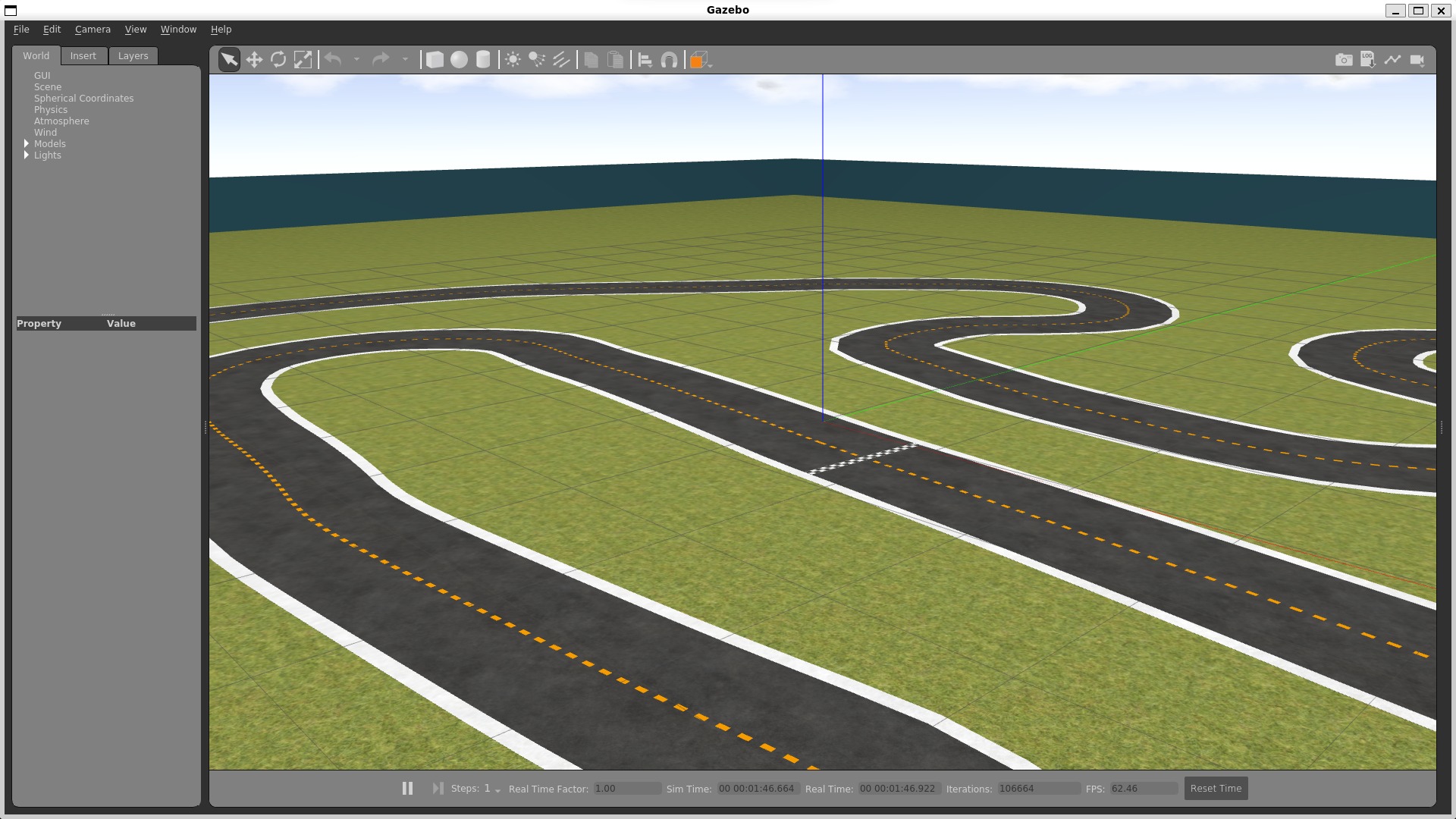
roslaunch simulation simulation.launchBut…. wait. There is a warning:
[Wrn] [ModelDatabase.cc:340] Getting models from[http://models.gazebosim.org/]. This may take a few seconds.Ok, it takes more than a few seconds and it seems to look for models in internet not in our simulation folder. Important: To avoid this you need to:
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/deep_ws/src/simulation/
export GAZEBO_RESOURCE_PATH=$GAZEBO_RESOURCE_PATH:~/deep_ws/src/simulation/Yes, there will be another warning about folder not being a model folder etc., but it can be ignored
After path exports simulation.launch will launch a race track world. To launch other world - just change its name in file or pass it as argument in shell.