AWS DeepRacer simulation: Teleoperation
Roadmap
- Setup
- Launch race track in Gazebo
- Car model
- Car control
- Teleoperation
Teleoperation
It is much more convenient to control a car with a joy or a keyboard. There are official ROS1 teleoperation packages teleop_twist_keyboard and teleop_twist_joy. But they convert keyboard/joy input into Twist message, and we need it to be an AckermannDriveStamped message. I have found ackermann-drive-teleop and it is pretty good, but:
- you can’t change increment/decrement step
- publish rate is fixed
- despite publishing an
AckermannDriveStampedmessage, it is published without stamp and frame_id - and params are set through arguments not parameter server
So, you guess it right, now we will write an improved teleoperation package for robots with ackermann steering.
Create new package in deep_ws/src folder
cd ~/deep_ws/src
# create package with name 'teleop_ackermann' and its dependencies
catkin_create_pkg teleop_ackermann rospy ackermann_msgs joy
cd ../
catkin_makeAfter
catkin_makebe sure to source your workspace!!!
Keyboard teleoperation
If you don’t have a joy, than its your option. Create a key_op.py in a script folder
# deep_ws/src/teleop_ackermann/scripts/key_op.py
#!/usr/bin/env python3
import rospy
from ackermann_msgs.msg import AckermannDriveStamped
import sys, select, termios, tty
# key bindings
keys = {
'up' : '\x41',
'down' : '\x42',
'right' : '\x43',
'left' : '\x44',
'space' : '\x20',
'tab' : '\x09'}
class KeyTeleopAckermann():
def __init__(self):
# get and set params
self.max_speed = rospy.get_param("~max_speed", 4.0)
self.max_steering_angle = rospy.get_param("~max_steering_angle", 0.523599)
self.scale_speed = rospy.get_param("~scale_speed", 10)
self.scale_angle = rospy.get_param("~scale_angle", 10)
self.update_rate = rospy.get_param("~update_rate", 50) # Hz
# set custom increment/decrement step
self.key_ops = {
'\x41' : ( self.max_speed/self.scale_speed, 0.0),
'\x42' : (-self.max_speed/self.scale_speed , 0.0),
'\x43' : ( 0.0 ,-self.max_steering_angle/self.scale_angle),
'\x44' : ( 0.0 , self.max_steering_angle/self.scale_angle)}
self.speed = 0
self.steering_angle = 0
self.ack_pub = rospy.Publisher('ackermann_cmd', AckermannDriveStamped, queue_size=1)
self.print_info()
# publish ackermann_msg with a custom rate
rospy.Timer(rospy.Duration(1.0/self.update_rate), self.publish_message)
# control key input
self.control()
if __name__ == '__main__':
try:
rospy.init_node('key_teleop_ackermann_drive', anonymous=True, log_level=rospy.INFO)
node = KeyTeleopAckermann()
except KeyboardInterrupt:
print("Shutting down ROS key_teleop_ackermann_drive node")at the start user is greeted with text information about key-bindings and current input state
def print_info(self):
sys.stderr.write('\x1b[2J\x1b[H')
rospy.loginfo('\x1b[1M\r*********************************************')
rospy.loginfo('\x1b[1M\rUse up/down arrows to change speed')
rospy.loginfo('\x1b[1M\rUse left/right arrows to change steering angle')
rospy.loginfo('\x1b[1M\rUse space to brake and tab to align wheels')
rospy.loginfo('\x1b[1M\r*********************************************')
rospy.loginfo('\x1b[1M\r'
'\033[34;1mSpeed: \033[32;1m%0.2f m/s, '
'\033[34;1mSteering Angle: \033[32;1m%0.2f rad\033[0m',
self.speed, self.steering_angle)with a chosen rate rospy.Timer will publish AckermannDriveStamped message
def publish_message(self, event):
# publish message with stamp and frame_id
msg = AckermannDriveStamped()
msg.header.stamp = rospy.Time.now()
msg.header.frame_id = '/base_link'
msg.drive.speed = self.speed
msg.drive.steering_angle = self.steering_angle
self.ack_pub.publish(msg)\Control loop is running until node shutdown, reads inputs from terminal window, clips inputs so they are in a min/max range and prints updated info
def control(self):
self.settings = termios.tcgetattr(sys.stdin)
while not rospy.is_shutdown():
key = self.read_key()
if key in keys.values():
if key == keys['space']:
self.speed = 0.0
elif key == keys['tab']:
self.steering_angle = 0.0
else:
a_speed, a_angle = self.key_ops[key]
self.speed = self.speed + a_speed
self.steering_angle = self.steering_angle + a_angle
# clip in between min and max values
self.speed = max(min(self.max_speed, self.speed), 0)
self.steering_angle = max(min(self.max_steering_angle, self.steering_angle), -self.max_steering_angle)
if self.speed==0:
self.steering_angle=0
self.print_info()
elif key == '\x03': # ctr-c
break
else:
continue
# publish last zero commands
self.settings = termios.tcgetattr(sys.stdin)
self.speed = 0
self.steering_angle = 0
self.publish_message(self.speed)
sys.exit()
def read_key(self):
tty.setraw(sys.stdin.fileno())
select.select([sys.stdin], [], [], 0)
key = sys.stdin.read(1)
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, self.settings)
return keyCreate a key_teleop.launch in launch folder
<!-- deep_ws/src/teleop_ackermann/launch/key_teleop.launch -->
<?xml version="1.0"?>
<launch>
<arg name="max_speed" default="4.0"/>
<arg name="max_steering_angle" default="0.523599"/>
<arg name="scale_speed" default="10"/>
<arg name="scale_angle" default="10"/>
<arg name="update_rate" default="50"/>
<node name="teleop" pkg="teleop_ackermann" type="key_op.py" output="screen">
<param name="max_speed" value="$(arg max_speed)"/>
<param name="max_steering_angle" value="$(arg max_steering_angle)"/>
<param name="scale_speed" value="$(arg scale_speed)"/>
<param name="scale_angle" value="$(arg scale_angle)"/>
<param name="update_rate" value="$(arg update_rate)"/>
</node>
</launch>Now you can launch simulation and teleoperation
cd ~/deep_ws/src
. ~/deep_ws/devel/setup.bash
roslaunch simulation simulation.launch
# in another terminal window
cd ~/deep_ws/src
. ~/deep_ws/devel/setup.bash
roslaunch teleop_ackermann key_teleop.launch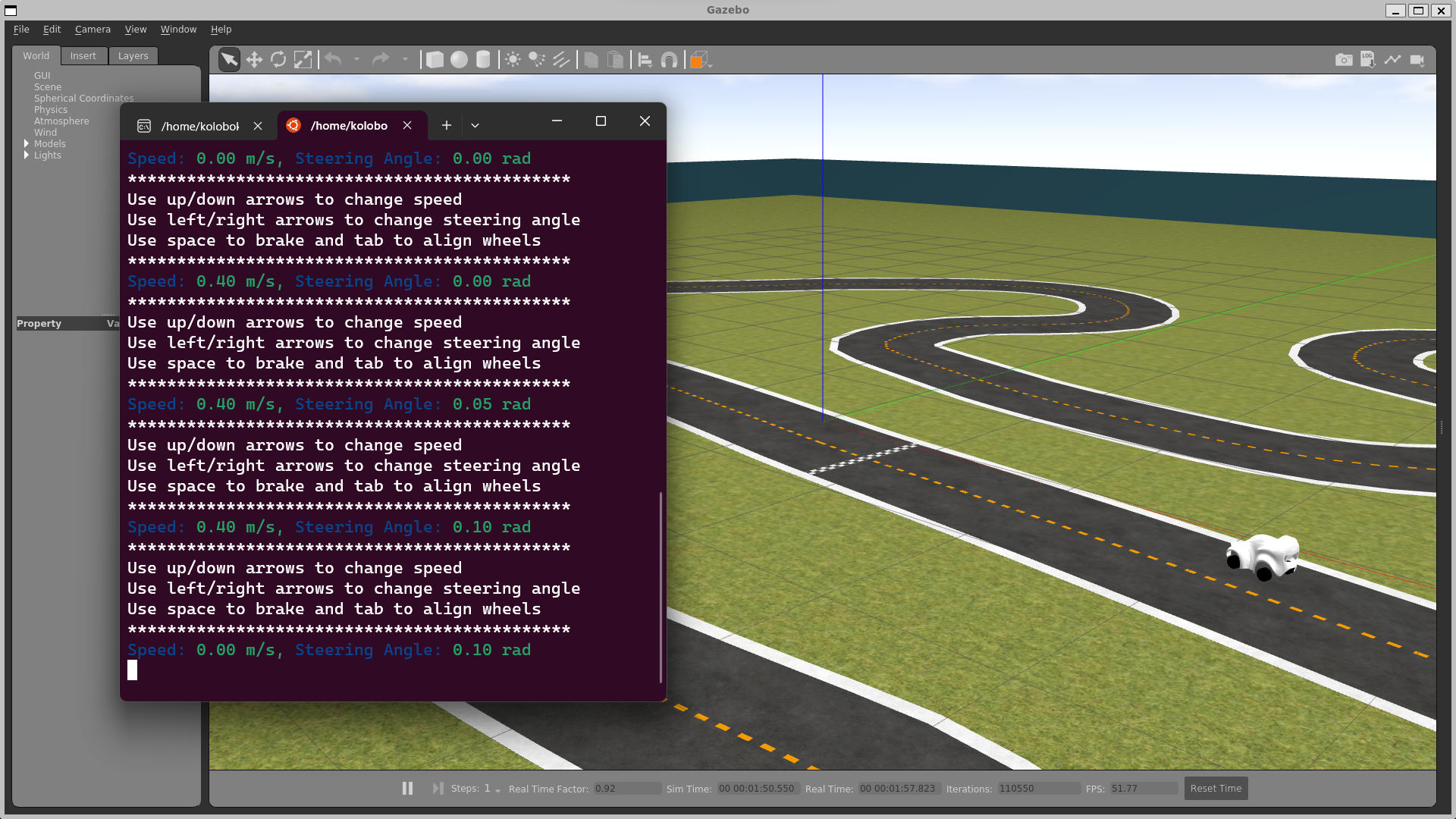
Joy teleoperation
With joy it is easier to control a car than with a keyboard. Create a joy_op.py in a script folder
# deep_ws/src/teleop_ackermann/scripts/joy_op.py
#!/usr/bin/env python3
import rospy
from ackermann_msgs.msg import AckermannDriveStamped
from sensor_msgs.msg import Joy
import sys, termios
class JoyTeleopAckermann():
def __init__(self):
# get and set params and joy button bindings
self.max_speed = rospy.get_param("~max_speed", 4.0)
self.max_steering_angle = rospy.get_param("~max_steering_angle", 0.523599)
self.steering_axis = rospy.get_param("axis_steering", 0)
self.speed_axis = rospy.get_param("axis_speed", 4)
self.stop_button = rospy.get_param("stop_button", 4)
self.align_button = rospy.get_param("align_button", 6)
self.update_rate = rospy.get_param("~update_rate", 50) # Hz
self.speed = 0
self.steering_angle = 0
self.print_info()
# subscribe to a topic which publishes which buttons/sticks on a joy where pressed or moved
self.joy_sub = rospy.Subscriber('joy', Joy, self.joy_callback, queue_size=1)
self.ack_pub = rospy.Publisher('ackermann_cmd', AckermannDriveStamped, queue_size=1)
# publish ackermann_msg with a rate
rospy.Timer(rospy.Duration(1.0/self.update_rate), self.publish_message)
if __name__ == '__main__':
try:
rospy.init_node('joy_teleop_ackermann_drive', anonymous=True, log_level=rospy.INFO)
node = JoyTeleopAckermann()
except KeyboardInterrupt:
print("Shutting down ROS joy_teleop_ackermann_drive node")Print text informatio
def print_info(self):
sys.stderr.write('\x1b[2J\x1b[H')
rospy.loginfo('\x1b[1M\r*********************************************')
rospy.loginfo('\x1b[1M\rUse up/down stick to change speed')
rospy.loginfo('\x1b[1M\rUse left/right stick to change steering angle')
rospy.loginfo('\x1b[1M\rUse L1 button to brake and L2 button to align wheels')
rospy.loginfo('\x1b[1M\r*********************************************')Update stearing angle and speed from joy or stop control on exit
def joy_callback(self, data):
"""Callback on each change in joy message
Args:
data (sensor_msgs.Joy): joy message
"""
if (data.buttons[self.stop_button]==1):
self.stop()
elif(data.buttons[self.align_button]==1):
self.steering_angle = 0.0
else:
self.speed = max(round(data.axes[self.speed_axis], 2) * self.max_speed, 0.0)
self.steering_angle = round(data.axes[self.steering_axis], 2) * self.max_steering_angle
if self.speed==0:
self.steering_angle=0
def stop(self):
# publish last zero commands
self.settings = termios.tcgetattr(sys.stdin)
self.speed = 0
self.steering_angle = 0
self.publish_message(self.speed)
sys.exit()Publish an AckermannDriveStamped message with a custom rate
def publish_message(self, event):
msg = AckermannDriveStamped()
msg.header.stamp = rospy.Time.now()
msg.header.frame_id = '/base_link'
msg.drive.speed = self.speed
msg.drive.steering_angle = self.steering_angle
self.ack_pub.publish(msg)
rospy.loginfo('\x1b[1M\r'
'\033[34;1mSpeed: \033[32;1m%0.2f m/s, '
'\033[34;1mSteering Angle: \033[32;1m%0.2f rad\033[0m',
self.speed, self.steering_angle)Create a joy.yaml config file to put there joy bindings
<!-- deep_ws/src/teleop_ackermann/config/joy.yaml -->
axis_speed: 4
axis_steering: 0
stop_button: 4
align_button: 6Install ROS nodes and drivers for a joystick
sudo apt-get install ros-noetic-joyIn order to use a joystick, it must have read and write permissions. You can grant such permissions by executing the following command:
sudo chmod a+rw /dev/input/js0Create a joy_teleop.launch in launch folder
<!-- deep_ws/src/teleop_ackermann/launch/joy_teleop.launch -->
<?xml version="1.0"?>
<launch>
<!-- joy args -->
<arg name="joy_dev" default="/dev/input/js0" />
<arg name="config_filepath" default="$(find teleop_ackermann)/config/joy.yaml" />
<arg name="joy_topic" default="joy" />
<!-- load node for publishing joy messages -->
<node pkg="joy" type="joy_node" name="joy_node">
<param name="dev" value="$(arg joy_dev)" />
<param name="deadzone" value="0.3" />
<param name="autorepeat_rate" value="20" />
<remap from="joy" to="$(arg joy_topic)" />
</node>
<!-- load params of the joy -->
<rosparam command="load" file="$(arg config_filepath)" />
<!-- additional node args -->
<arg name="max_speed" default="4.0"/>
<arg name="max_steering_angle" default="0.523599"/>
<arg name="update_rate" default="50"/>
<node name="teleop" pkg="teleop_ackermann" type="joy_op.py" output="screen">
<param name="max_speed" value="$(arg max_speed)"/>
<param name="max_steering_angle" value="$(arg max_steering_angle)"/>
<param name="update_rate" value="$(arg update_rate)"/>
<remap from="joy" to="$(arg joy_topic)" />
</node>
</launch>Now you can launch simulation and teleoperation
# in every terminal window source your workspace
cd ~/deep_ws/src
. ~/deep_ws/devel/setup.bash
roslaunch simulation simulation.launch
# in another terminal window
cd ~/deep_ws/src
. ~/deep_ws/devel/setup.bash
roslaunch teleop_ackermann joy_teleop.launch